 |
キムヒデの2004幸田エコノムーブチャレンジカップレポート |
2004/11/22 21:30 |
|

2004シーズンの締めくくりのレース
いやぁ・・・今年も秋田のワールド・エコノ・ムーブ(WEM)から始まり、ギリシャのソーラーカーレース"Phaethon"など、いろんなところを転戦してきましたが、いよいよ最後のレースとなりました。全6戦からなるワールド・エコノ・ムーブ・グランプリ(WEMGP)戦の最終戦「幸田エコノムーブチャレンジカップ」が、愛知県額田郡幸田町にある「幸田サーキット」で開催されました。今回は、二玄社CAR GRAPHIC編集部チームのCG-FINE号が出場することになりましたので、池上さんやキムヒデ部隊はこちらのチームに参加しました。
幸田サーキットの事前情報
今年から初めてWEMGPに組み込まれた幸田エコノムーブチャレンジカップ。ということで、いったいどんなコースなのか情報を集めることがまず第一歩となるだろう。この幸田サーキットはカートから一般車までが走行できるコースであり、直感的には筑波よりきつく、余目よりゆるいくらいに想像していました。そのため、330mmのトレッドのミラクルでんちくん&スーパーモスラ、350mmのファラデーマジック2は、白浜のコーナーリングでさえも苦戦する状況であるので厳しそうである。ここはやはり554mmの巨大トレッドのCG号や鬼キャン仕様の旧モスラでないと勝負にならないだろうと考えていました。(菅生サーキットに当初スーパーモスラでエントリーした後に、モスラへ車体変更をしたため、「モスラ」=「スーパーモスラS」という変な名前になってしまいました。)CG編集部の岩尾さんも、今年は面白そうなコースである幸田にぜひ出場したいという話でしたので、第6戦はCG号で勝負しようと以前から考えていたのでした。コース図を見ると、R13というタイトなコーナーもあるし、なかなかきつそうである。でんきプリンの古橋さんの話だと「25〜30km/hくらいでないと曲がりきれない」という情報も入ってきている。ここは、勝負のポイントになりそうだ。そして、何よりも頭が痛かったのが、2.4%の登り勾配であった。けっきょく、11月3日の試走会に出たチームの話からコースを反対向きに走行するということを知りましたので、この場所は下り勾配となってしまいましたが・・・。それでも、1.8%の登り勾配があるので、この坂への対応方法が勝負の最大の分かれ目になりそうです。
まず、この幸田大会だけの特殊なルールについて説明しよう。秋田や豊田、そして昨年CG号が出場した筑波のエコノムーブ大会では、軽量なドライバーが有利になりすぎないように、ドライバーの体重が70kgになるよう車体にバラストを積んで調整していた。また、白浜でも同様な理由で60kgとしている。一方、菅生の大会では、どんなドライバー体重であってもバラスト無しというところもあった。ところが、幸田の大会では車体+ドライバーの総重量が80kg以上というルールになっている。これだと、重たい車体であっても、勝負になる可能性が出てくる。大きくて重たいCG号であるが、軽量なドライバーを搭乗させれば勝負になりそうである。この段階で、重量級の岩尾さんとキムヒデは脱落し、ファラデーマジック2のドライバーである菊田君に登場願うことになった。これで、私が乗るよりも約20kgは軽量化でき、戦闘力を持つことができるだろう。しかし今から思い起こせば、コースを逆回りするという情報を入手するのが遅かったのが作戦ミスにつながったと思われます。ところで、このようなレギュレーションが出てきたのでしょうか?その背景について考えます。タイヤバリヤや他の車にエコランカーがぶつかった場合、バラストが危険を招くので、できるだけ搭載させたくないという考えの主催者もいます。しかし、バラスト無しだと軽量なドライバー捜しに奔走することになりレースがつまらなくなります。そんな中で、車検を簡略化でき、比較的バラストの搭載量が減らせる幸田方式にはメリットがあるようにも思えます。しかし、車体の軽量化という省エネルギーに直結する技術開発の意味は薄れてしまいます。CG号には好都合なレギュレーションでしたが、私のような70kg超級ドライバーはレースに出るなという意味に等しいです。とりあえず、軽量な車体が有利になるという条件は評価され、標準的な体重の人が運転しても不利になりすぎようなレギュレーションが競技の性格に合っているように思います。(個人的には国際化を目指すなら、ワールド対応で考えないといけないのかなと感じています。)
CG-FINE専用ファインメットDDモータ
さて、CG号のモータといえば、ミツバさんのDDモータ。CG号登場のときからの搭載し続け、昨年の筑波サーキットでは奇跡の優勝まで遂げている。今回は、幸田のためにチーム・ジャンクヤードの520Wソーラーカー「ガメラ」の曇天用?DDモータ(ソーラーカー用としては小型サイズ)のケースに、日立金属のファインメット(FINEMET)を電磁鋼板として採用しました。ファインメットというのは、ナノサイズの微結晶(ナノクリスタル)の鉄のこと。物性的にはアモルファスよりも飽和磁束が若干小さいものの、鉄損がさらに小さくなるという軟磁性材料のことだ。現時点ではアモルファスよりもメリットがあるのかないのか微妙なところなのですが、チャレンジ精神を重んじて採用しました。鉄損と銅損の折り合いを調整するのが難しいようでしたが、なかなかの性能を発揮してくれました。このファインメットコアを採用したことから、車体名は「CG-FINE」と名付けられました。また、奇跡的な勝利を願って、2003年に奇跡的な勝利をつかんだミラクルでんちくんにあやかり、チーム名は「ミラクルCG」となりました。(○○専用の赤いやつと聞くと、なんかうれしくなってしまうのは私だけではないでしょう!)

CG-FINEとスーパーモスラSは菅生戦法を採用
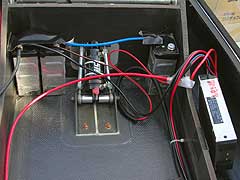
事前の情報では、2.4%の登り勾配がありタイトなコーナーが連続するという情報などから、CG-FINE(キムヒデ)と写真左のスーパーモスラS(籾井君)は、それぞれに検討を行いました。その結果、両者とも菅生方式を採用することで意見が一致しました。浪越エレクトロニクスのモータコントローラがDC/DCコンバータとして使用した場合、幸田の条件では94%程度の高い変換効率が得られることを確認できたことも菅生戦法採用の追い風となりました。この菅生戦法は優勝したfirst step AISIN AWも採用していたので、ある程度正解であったと思いますが、2位のうにゃにゃん亀吉は通常の走法(白浜戦法)であったので、作戦の優劣をつけるのは微妙なところです。写真右は、CG-FINE号に搭載した日本ケミコンのDLCAPと浪越エレクトロニクスのモータコントローラMPC520。
公式予選はCG-FINEが激走
公式予選は、CG-FINEのポテンシャルを発揮するにはもってこいのシチュエーションだ。大きめのモータ、広い視界、広いトレッド、低い重心、そして自由自在のキャパシタパワー。菅生戦法を採用した場合、モータの許容電圧範囲内であればキャパシタ電圧を上げれば上げただけ速度とパワーが出るようになります。そこで、48Vにまでキャパシタ電圧を引き上げ、進角も使い爆走しました。ラップタイムは1分30秒41というすばらしい記録でした。きっくう(菊田君)さすが・・・。やはり、最後の決め手となったのは大きいモータパワーとドライバーの根性と技術でしょうか。巨大なCG-FINE号がコース上を走るのを見ると、やはり条件が無制限なら大きい方が勝つということを実感しました。と同時に、明日の本戦は厳しい戦いになりそうだということも改めて再認識させられました。2位にはステータの横ずらしによる変速機能を持ったモータを搭載したつスーパーエナジーのGRIFFONが入りました。業界トップレベルの低重心車体車体なので、コーナリングは強そうです。ドライバーの田中さんもタイムトライアルの最後の最後までCG-FINE号に食らいつき、熱い走りを見せてくれました。3位には、内海君の快走で一時はトップに躍り出た大誠テクノ魁SAKIGAKEが入った。
 
本戦はつばさ52号が快走し優勝
公式予選の翌日に行われた本選では終始つばさ52号がトップを走り、その後をエコノ亀吉2.5号が追う展開に。スーパーエナジーのGRIFFONが徐々に順位を下げる中で、つばさ53号が順位を3位にまで上げてきた。東京工業大学MeisterのLucciolaは、ヨイショット!ミツバのHyper USO800との激戦を制して4位に入り、今期最高の戦いを見せました。
 
注目の一品
さて、恒例の一品探しです。今回は、まずモータに注目してみました。まず、左はHyper USO800のDDモータ。菅生仕様と同じ外観ですね。右は、GRIFFONのDDモータ。こちらも菅生用のモータとまったく同じようにように見えますが、確か・・・白浜でも使っていました。チームの人に突撃インタビューすると、1レース毎に巻き線仕様を変えているそうです。大変な根性ですね。なお、スーパーエナジーは、白浜戦法を採用していました。
次は、長野工業高校のDDモータ。相当な気合いを感じますね(左)。かなりのできばえで、エコラン界屈指の性能がありそうです。右はT-Worksが使用していた自作DDモータのコア。ところが、電流を流しすぎてしまい、巻き線がダメになってしまいました・・・。それにしても、最近はレベルの高い自作DDが増えてきましたね。私も、そろそろ手を出してみたくなってきました。
 
あれっ!?よく見るとミラクルでんちくんのアルミボディバージョンの車がいるぞ?! チーム資金不足の「あばれうまPROTO」は、ミラクルでんちくんとそっくりの姿。実は、池上さんからCADデータをもらい、拡幅するなどのアレンジを行って製作したそうである。どうりで似ているはずだ・・・。最後は、ZDP鍋奉行の澁谷さん。今回はCG-FINEとスーパーモスラSそしてSAKIGAKEの3台分を料理していました。前回の白浜では、鍋奉行の出番が無かっただけにはりきっていました。電気化学屋としての戦いも楽しめるのがEVエコラン。裾野の広さを感じさせますね。
 
優勝チームから学ぶ
今回のミラクルCGとZDPは、公式予選ではがんばったものの本戦では不発気味でした。そこで、この結果について分析することにします。まずは、勝利者のつばさ52号のセッティングを見てきましょう。キャパシタは日本ケミコン製の2.5V-600Fを直列にしたものでした。電圧はキャパシタの本数からいって30V前後だろうか。このキャパシタに浪越コントローラを使って定電流放電を行っていました。最大の特徴は、キャパシタとモータの間にDC/DCコンバータのブースト機能があることです。これにより、追い越しを容易に行えるようになっているそうです。狭いコースでは走行ラインをふさがれることも多いようですが、自由自在なポジショニングによってエネルギーを節約するのに役立ったそうです。モータは特殊電装のアモルファスDCブラシレスモータ1台。坂を登るのにはパワー不足だったので、24Vよりも電圧を上げて使用したようです。しかし、最適な減速比を実現するギヤの製作が間に合わず、特製は若干ずれているそうです。
 
菅生戦法か白浜戦法か
標高差5.6mのコースで、最大勾配が2.4%の坂。10%の勾配をもつ菅生サーキットではスタンダードとなりつつある、電気二重層コンデンサにDC/DCコンバータで定電流充電する「菅生戦法」がよいのか、それとも1%の勾配に対して、惰性走行やDC/DCコンバータの電圧を上乗せする「白浜戦法」がよいのか、微妙なところです。意見が分かれるところではないでしょうか? とりあえず、見当をつけるために走行シミレーションをやってみました。次のグラフは、本来の向き(順周り)で走行したときの車体シミュレーションの結果です。この結果は、24Vのある優秀なDDモータを使った場合の傾向について調べたもので、精度はあまり気にしていません。しかし、この結果から9A以上のピーク電流が流れてしまうことがわかります。また、ヘアピンコーナーを35km/h以上で曲がることになり、回生ブレーキによる減速が必要であるように思えました。もちろん、モータとバッテリを切り離して、坂を下るという戦法も考えられなくはないですが、先述した理由から難しそうです。
そこで、菅生戦法を取り入れた場合のシミュレーションを行ってみました。セッティングにもよりますが、ピークパワーが200Wを下回り、回生ブレーキもじわっと効く感じ。連続ヘアピンゾーンではまだ速度が出すぎるような気もしますが、回生ブレーキ&再加速が多くなるような展開であれば、キャパシタの低インピーダンス特性と、大きめのモータで走る菅生戦法の方がメリットがあるように思えました。ということで、これがCG-FINEのセッティングの根拠となりました。
次に、実際に大会が行われた逆回りで、通常の走行シミュレーション(白浜戦法)を行ってみた。2.4%の登り坂が下りになり、1.8%の下り坂が登りになったことで、ピークパワーが200Wを切ってしまいます。この辺から、当初予定していた仕様からミスマッチが発生し始めたように思います。
さらに、逆回りで菅生戦法を取り入れると、なんと170Wくらいのピークパワーで済んでしまうことがわかる。ピークの消費電力は電圧34Vに対して電流値的には5Aくらい。これだと、通常の大会で使用するモータでもなんとかなってしまうかもしれません。いや、なったでしょう。しかも大半の時間は、2A程度以下の電流値となっています。菅生用モータを投入したスーパーモスラSは、アモルファスという材料をもってしても、モータの体格が大きすぎたように思えます。CG-FINE号もスーパーモスラSほどではないものの、まだまだ体格が大きめとなっていたのかもしれません。(でも、そんなに外しているとは思えないんだけどなぁ・・・。)さらに、タイトコーナを旋回中の転がり抵抗の悪化も大きく、当初の予測よりもだいぶ平均速度が下がってしまいました。そのため、その分は軽いギヤ比を使えるようになります。そのため、エコノ亀吉2.5号のセッティングも、かなりいいところを突いていたと思われます。
さらに、現地に着いて実際にコースを見てみると、思っていたイメージとだいぶ違う感じがしました。まず、下側のフラットと思われていた連続コーナーのゾーンは、若干傾斜があるように見えました。ということは、高低差は実際には大きかったかもしれないし、もしかするとピークの勾配が小さかったのかもしれません。下の写真で人が歩いているあたりが地図上では7番あたりのコーナで、撮影した位置とは水平のはずなんですが、傾斜が続いているように見えませんか?

けっきょく、全幅750mm×全高700mmの大きなCG-FINEは、一般のエコランカーに比べて1.5〜2倍もの前面投影面積を持っています。セッティングのずれも多少影響していると思いますが、やはりハイレベルな戦いになってくると車体の性能差が効いてくるので、CG-FINEでは空気抵抗のハンディーキャップが相当辛くなってくるようです。スーパーモスラSについても、菅生で優勝した優秀なモータであっても、コースに対してちょっと大きすぎただけで結果を出せなくなったと言えます。2004年の競技レベルは過去に例がないほど高くなったということを実感しました。
 
以上、1年間にわたりエコノームーブやソーラーカーといった省エネルギー自動車レースについてレポートしてきました。いやぁ、自分で読み返しても、かなり書いてきましたね。「やっと終わった・・・。」というのが正直な感想です。少しでもレースが楽しめるように、そして競技レベルが上がるようにという思いで、好き勝手に書いてきました。キムヒデもまだまだ勉強しないといけないことばかりなので、ぜひいろんな情報を教えて下さいね。レポートでは時間の関係で書ききれなかった(舌足らずで終わってしまった)ことも多いのですが、オフシーズンに読み直してみると、きっと行間には書ききれなかった思いも詰まっているはずです。まだまだ、深く知りたいという人は、2005年1月29日(土)に開催される「電気自動車・燃料電池車・ソーラーカー製作講習会」に参加して、いろんな情報をぜひ交換しましょう。(おっとその前に、忘年会か・・・。)(k)
▲TOPへ戻る
|
